Heuristic Planner for Mixed Discrete/Continuous Domains
DiNo is capable of reasoning with the full PDDL+ set of features and non-linear system dynamics. It extends the functionality of UPMurphi, by employing informed search algorithms and a new domain-independent heuristic - Staged Relaxed Planning Graph+ (SRPG+).
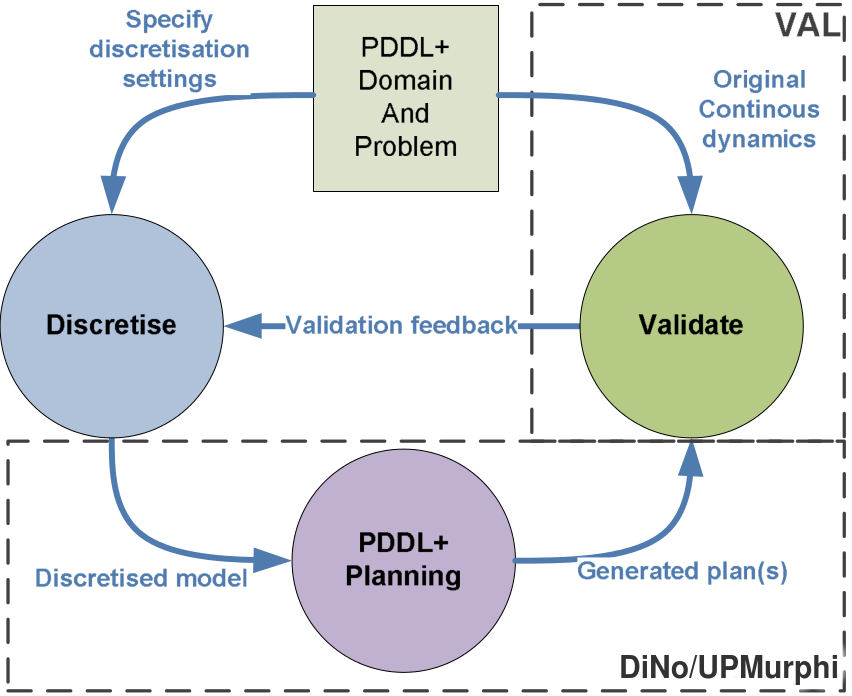
DiNo relies on UPMurphi's Discretise & Validate approach to handle continuous system dynamics. It also exploits the Planning as Model Checking paradigm.
PDDL+
PDDL+ is an extension of PDDL (Planning Domain Definition Language), a standardised modelling language used in Automated Planning. PDDL, first developed in 1998, is continuously upgraded to keep up with emerging planning concepts. Notable extensions include PDDL2.1 (introducing e.g. numeric fluents, plan metrics, and temporal infromation) and PDDL2.2 (e.g. Timed Initial Literals).
PDDL+ encompasses the aforementioned updates, and introduces the ablity to express exogenous events and continuous processes. PDDL+ enabled the most accurate standardised way yet, of defining Hybrid Systems as planning domains.