Planner Interface
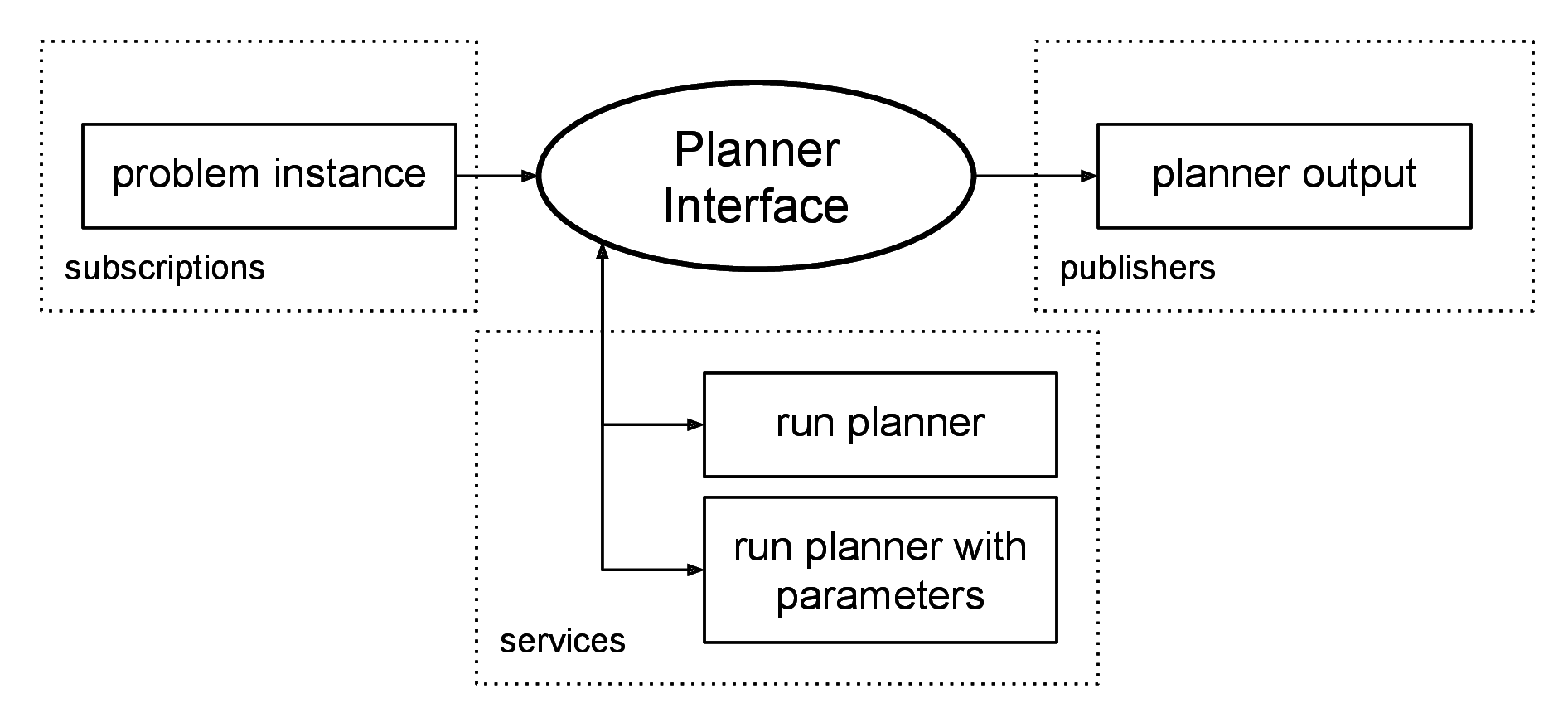
The Planner Interface node is a wrapper for the AI Planner. The planner is called through a service, which returns true if a solution was found. This interface feeds the planner with a domain file and problem instance, and calls the planner with a command line specified by parameter. The problem instance can be supplied through subscription to a problem topic, or by file. The resulting solution, if one was found, can be written to a file and/or published on a ROS topic.
Contents:
- Launch
- Services
- Publishers
Launching a Planner Interface
There are implementations of the Planner Interface node used with the planners:
| Node Type | Compatible Planners | Website |
| popf_planner_interface | POPF | nms.kcl.ac.uk/planning/software/popf |
| OPTIC | nms.kcl.ac.uk/planning/software/optic | |
| ff_planner_interface | FF, Metric-FF, Contingent-FF | fai.cs.uni-saarland.de/hoffmann/ff |
| lpg_planner_interface | LPG | lpg.unibs.it/lpg |
| tfd_planner_interface | TFD | gki.informatik.uni-freiburg.de/tools/tfd |
| smt_planner_interface | SMTPlan | kcl-planning.github.io/SMTPlan |
An example launch file showing all the parameters is shown below:
<launch>
<!-- arguments -->
<arg name="node_name" default="rosplan_planner_interface" />
<arg name="use_problem_topic" default="true" />
<arg name="problem_topic" default="/rosplan_problem_interface/problem_instance" />
<arg name="planner_topic" default="planner_output" />
<arg name="domain_path" default="$(find rosplan_demos)/common/domain_turtlebot_demo.pddl" />
<arg name="problem_path" default="$(find rosplan_demos)/common/problem.pddl" />
<arg name="data_path" default="$(find rosplan_demos)/common/" />
<arg name="planner_command" default="timeout 10 $(find rosplan_planning_system)/common/bin/popf DOMAIN PROBLEM" />
<!-- planner interface -->
<node name="$(arg node_name)" pkg="rosplan_planning_system" type="popf_planner_interface" respawn="false" output="screen">
<!-- read problem from topic (instead of from file) -->
<param name="use_problem_topic" value="$(arg use_problem_topic)" />
<!-- ros topics -->
<param name="problem_topic" value="$(arg problem_topic)" />
<param name="planner_topic" value="$(arg planner_topic)" />
<!-- directory for files -->
<param name="domain_path" value="$(arg domain_path)" />
<param name="problem_path" value="$(arg problem_path)" />
<param name="data_path" value="$(arg data_path)" />
<!-- to run the planner -->
<!-- planner command replaces strings 'DOMAIN' and 'PROBLEM' with paths -->
<param name="planner_command" value="$(arg planner_command)" />
</node>
</launch>
Services
Service: planning_server
Type: std_srvs/Empty
The service is intended to call a planner:
- The command line in parameter planner_command will be run.
- The domain_path parameter will replace the string ‘DOMAIN’ in the command line.
- If use_problem_topic is true, then the last problem instance published on the problem topic will be passed to the planner, otherwise the problem will be read from problem_path.
- In either case, the problem path will replace the string ‘PROBLEM’ in the command line.
- The plan and any files generated by the planner will be written to data_path.
- The service returns when the command is finished, and returns true if a plan was found. The plan is published as a std_msgs/string on the planner topic.
Service: planning_server_params
Type: rosplan_dispatch_msgs/PlanningService
The planning_server is called, overriding the node parameters with the arguments of the service.
Publishers
Topic: planner_output
Type: std_msgs/String
If a plan is found by the planner, it is published on this topic.