Plan Dispatch
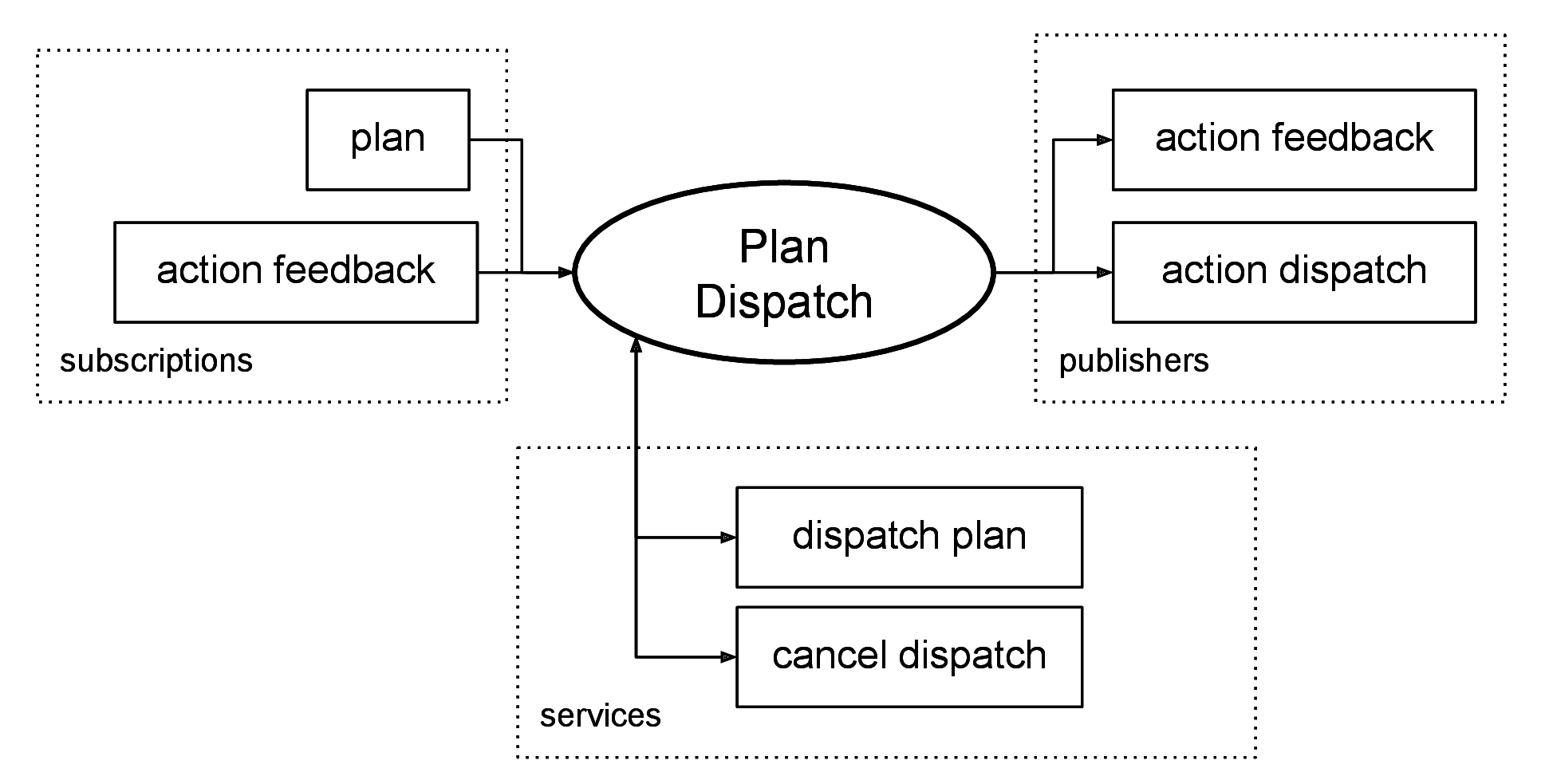
Plan Dispatch includes plan execution, and the process of connecting single actions to the processes which are responsible for their execution. An implementation of the Plan Dispatch node subscribes to a plan topic, and is closely tied to the plan representation of plans published on that topic. The plan is executed as a service, which returns true if the plan was executed without errors, and can be preempted.
Contents:
- Launch
- Services
- Publishers
Launching Plan Dispatch
There are two implementations of the Parsing Interface provided: pddl_simple_plan_dispatcher, and pddl_esterel_plan_dispatcher. See the plan_parsing node for more information on these representations, and the corresponding message type of the plan_topic.
An example launch file showing all the parameters is shown below:
<launch>
<!-- arguments -->
<arg name="node_name" default="rosplan_plan_dispatcher" />
<arg name="knowledge_base" default="rosplan_knowledge_base" />
<arg name="plan_topic" default="/rosplan_parsing_interface/complete_plan" />
<arg name="action_dispatch_topic" default="action_dispatch" />
<arg name="action_feedback_topic" default="action_feedback" />
<!-- plan dispatching -->
<node name="$(arg node_name)" pkg="rosplan_planning_system" type="pddl_esterel_plan_dispatcher" respawn="false" output="screen">
<param name="knowledge_base" value="$(arg knowledge_base)" />
<param name="plan_topic" value="$(arg plan_topic)" />
<param name="action_dispatch_topic" value="$(arg action_dispatch_topic)" />
<param name="action_feedback_topic" value="$(arg action_feedback_topic)" />
</node>
</launch>
Services
Service: dispatch_plan
Type: rosplan_dispatch_msgs/DispatchService
Begins the execution of the last plan message that was recieved on the plan_topic. The service returns when the plan has completed successfuly, or has failed.
Service: cancel_plan
Type: std_srvs/Empty
Attempt to cancel the plan execution currently underway.
Publishers
Topic: action_dispatch
Type: rosplan_dispatch_msgs/ActionDispatch
Each action to be executed will be published on this topic.
Topic: action_feedback
Type: rosplan_dispatch_msgs/ActionFeedback
Action feedback is published on this topic. The plan_dispatch node will also publish to this topic to provide feedback for actions which were not dispatched due to their preconditions not being achieved.