Tutorial 01 Problem Generation
1. Description
This tutorial will teach how to use ROSPlan to generate PDDL problems.
2. Prior Setup
This tutorial assumes that ROSPlan is already installed, following the instructions on the gihtub README: https://github.com/KCL-Planning/ROSPlan.
3.1 Launch File
Change directory to the ROSPlan workspace.
Create a new launch file, tutorial_01.launch, in the current directory and paste the following inside it:
<?xml version="1.0"?>
<launch>
<!-- arguments -->
<arg name="domain_path" default="$(find rosplan_demos)/common/domain_turtlebot.pddl" />
<arg name="problem_path" default="$(find rosplan_demos)/common/problem_turtlebot.pddl" />
<!-- knowledge base -->
<node name="rosplan_knowledge_base" pkg="rosplan_knowledge_base" type="knowledgeBase" respawn="false" output="screen">
<param name="domain_path" value="$(arg domain_path)" />
<param name="problem_path" value="$(arg problem_path)" />
<!-- conditional planning flags -->
<param name="use_unknowns" value="false" />
</node>
<!-- problem generation -->
<include file="$(find rosplan_planning_system)/launch/includes/problem_interface.launch">
<arg name="knowledge_base" value="rosplan_knowledge_base" />
<arg name="domain_path" value="$(arg domain_path)" />
<arg name="problem_path" value="$(find rosplan_demos)/common/problem.pddl" />
<arg name="problem_topic" value="problem_instance" />
</include>
</launch>
3.2 The Launch File Explained
The launch file will start 2 ROSPlan nodes.
<!-- arguments -->
<arg name="domain_path" default="$(find rosplan_demos)/common/domain_turtlebot.pddl" />
<arg name="problem_path" default="$(find rosplan_demos)/common/problem_turtlebot.pddl" />
<!-- knowledge base -->
<node name="rosplan_knowledge_base" pkg="rosplan_knowledge_base" type="knowledgeBase" respawn="false" output="screen">
<param name="domain_path" value="$(arg domain_path)" />
<param name="problem_path" value="$(arg problem_path)" />
<!-- conditional planning flags -->
<param name="use_unknowns" value="false" />
</node>
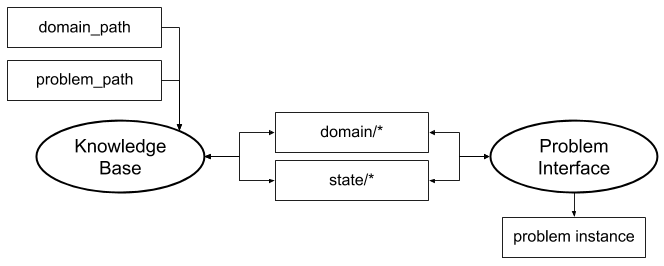
The first ROSPlan node started is the Knowledge Base. This node stores the PDDL model: both the domain and the current state.
The Knowledge Base node takes 4 parameters:
domain_pathis required and specifies a PDDL domain file. You can follow the path to view the domain file.problem_pathis an optional parameter to load an initial state. If this parameter is not set, then the state will contain no objects, any propositions will be false, and all functions will be initialised to zero.use_unknownsis used for conditional planning. If false, then a proposition not added to the Knowledge Base is assumed to be false in the initial state. If true, then it is assumed to be unknown; false propositions have to be explicitly stated.
<!-- problem generation -->
<include file="$(find rosplan_planning_system)/launch/includes/problem_interface.launch">
<arg name="knowledge_base" value="rosplan_knowledge_base" />
<arg name="domain_path" value="$(arg domain_path)" />
<arg name="problem_path" value="$(find rosplan_demos)/common/problem.pddl" />
<arg name="problem_topic" value="problem_instance" />
</include>
The second ROSPlan node started is the Problem Interface, which is launched from the included launch file.
The Problem Interface also has 4 parameters:
knowledge_basespecifies the node name of the Knowledge Base node that stores the current state.domain_pathspecifies the path to the domain file used by that Knowledge Base. In our launch file, we’ve declared the domain path as an argument at the top.problem_pathspecifies the path into which the new problem file will be written.problem_topicspecifies the topic name on which the problem will be published. In our launch file we’ve made it relative to the node name: rosplan_problem_interface/problem_instance.
3.3 Launching
From the terminal, launch the file:
roslaunch tutorial_01.launch
You should see the output from ROSPlan, identified by the prefix “KCL”:
KCL: (KB) Parsing domain
KCL: (KB) Parsing domain: /home/michael/ros_indigo/turtlebot/src/rosplan/rosplan_demos/common/domain_turtlebot.pddl.
KCL: (KB) Parsing initial state
KCL: (KB) Parsing Problem File: /home/michael/ros_indigo/turtlebot/src/rosplan/rosplan_demos/common/problem_turtlebot.pddl.
KCL: (/rosplan_problem_interface) Ready to receive
KCL: (KB) Ready to receive
3.4 Generating a Problem
Open another terminal and source the workspace.
source devel/setup.bash
In the second terminal, take a look at the node list and service list to see what is running:
rosnode list
rosservice list
In particular you should see the nodes: /rosplan_knowledge_base and /rosplan_problem_interface.
Then call the problem generation service (using tab complete is helpful)
rosservice call /rosplan_problem_interface/problem_generation_server
There will be no output in the second terminal, but in the first terminal you should see the following lines:
KCL: (/rosplan_problem_interface) (problem.pddl) Generating problem file.
KCL: (/rosplan_problem_interface) (problem.pddl) The problem was generated.
3.5 Viewing at the Problem
What does the problem look like?
It should look exectly like the problem that was loaded into the Knolwedge Base with the problem_path parameter. Nothing has changed, after all!
You can find the newly generated problem file in two places:
A. The file saved in the problem_path parameter of the problem_interface node. If you are looking for a file, this is where it is saved.
cat src/rosplan_demos/rosplan_demos/common/problem.pddl
B. Published on the topic specified by the problem_topic parameter. Use this command to echo the contents of that topic. The flag -n 1 means that only one message will be printed.
rostopic echo /rosplan_problem_interface/problem_instance -n 1 -p
4. What’s Next?
Passing the problem to a planner to produce a plan. The next tutorial: Tutorial 02: Planning