Knowledge Base Launch
The Knowledge Base can be launched by adding the following parameters and nodes to your launch file:
<launch>
<!-- arguments -->
<arg name="domain_path" default="$(find rosplan_demos)/common/domain_turtlebot.pddl" />
<arg name="problem_path" default="$(find rosplan_demos)/common/problem_turtlebot.pddl" />
<!-- knowledge base -->
<node name="rosplan_knowledge_base" pkg="rosplan_knowledge_base" type="knowledgeBase" respawn="false" output="screen">
<param name="domain_path" value="$(arg domain_path)" />
<param name="problem_path" value="$(arg problem_path)" />
<param name="database_path" value="$(find rosplan_knowledge_base)/common/mongoDB/" />
<!-- conditional planning flags -->
<param name="use_unknowns" value="false" />
</node>
<!-- scene database (MongoDB) -->
<include file="$(find mongodb_store)/launch/mongodb_store.launch">
<arg name="db_path" value="$(find rosplan_knowledge_base)/common/mongoDB/"/>
</include>
</launch>
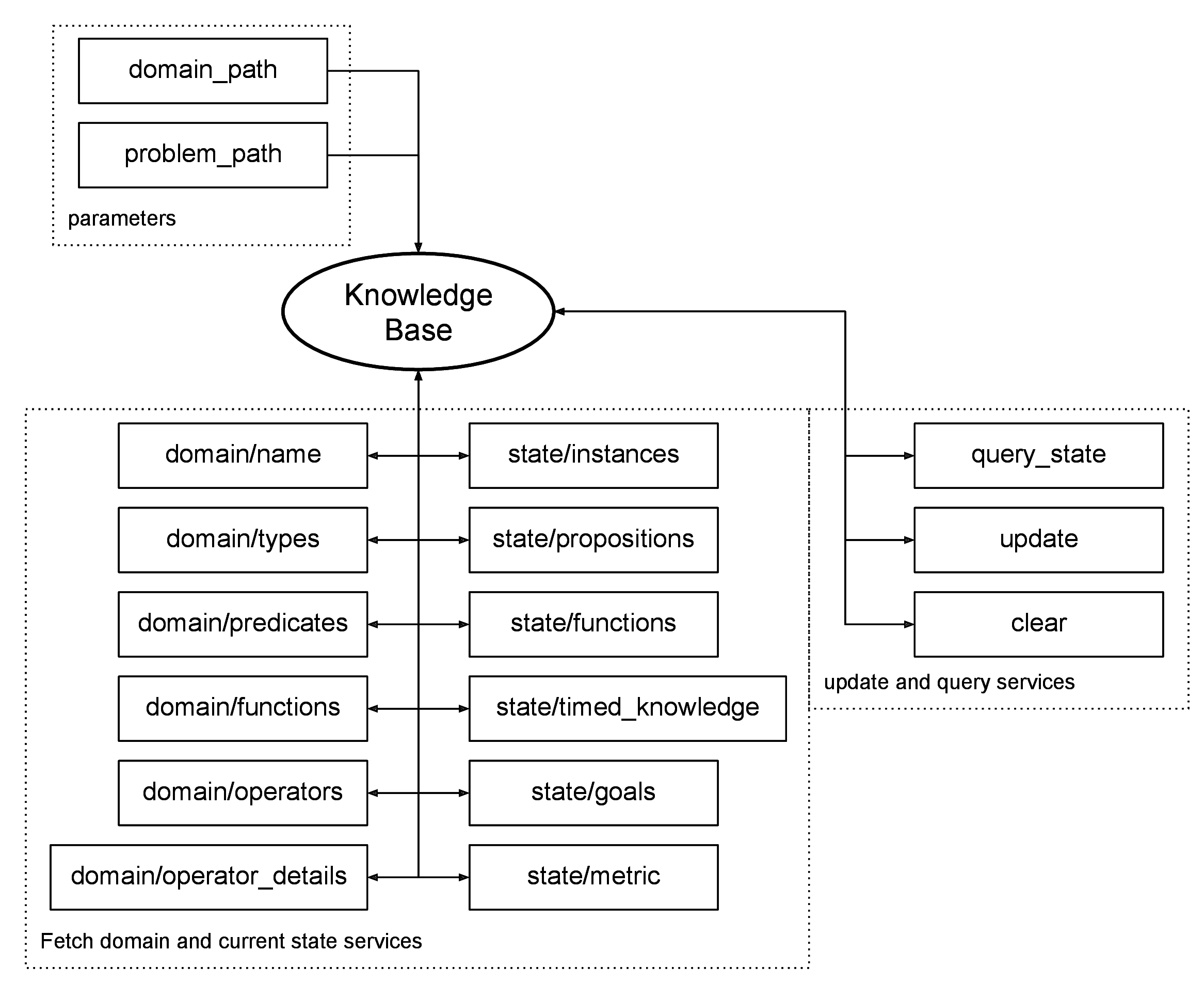
- The rosplan_knowledge_base node stores the PDDL model. It can be queried for information on the PDDL domain model, and problem instance. It should be updated by state estimation.
- The scene_database node is a ROS interface to a MongoDB, maintained by the University of Birmingham, mongodb_store on ROS wiki.
Parameters
| Parameter | Optional? | Description |
| domain_path | Path to the PDDL domain file. | |
| problem_path | Yes | Path to the PDDL problem file specifying the initial state. |
| database_path | Path to files generated by MongoDB. | |
| use_unknowns | If true, facts not explicitly entered as false in the knowledge base are assumed to be unknown. This is used for planning under uncertainty. |