ROSPlan Overview
The ROSPlan framework provides a collection of tools for AI Planning in a ROS system. ROSPlan has a variety of nodes which encapsulate planning, problem generation, and plan execution.
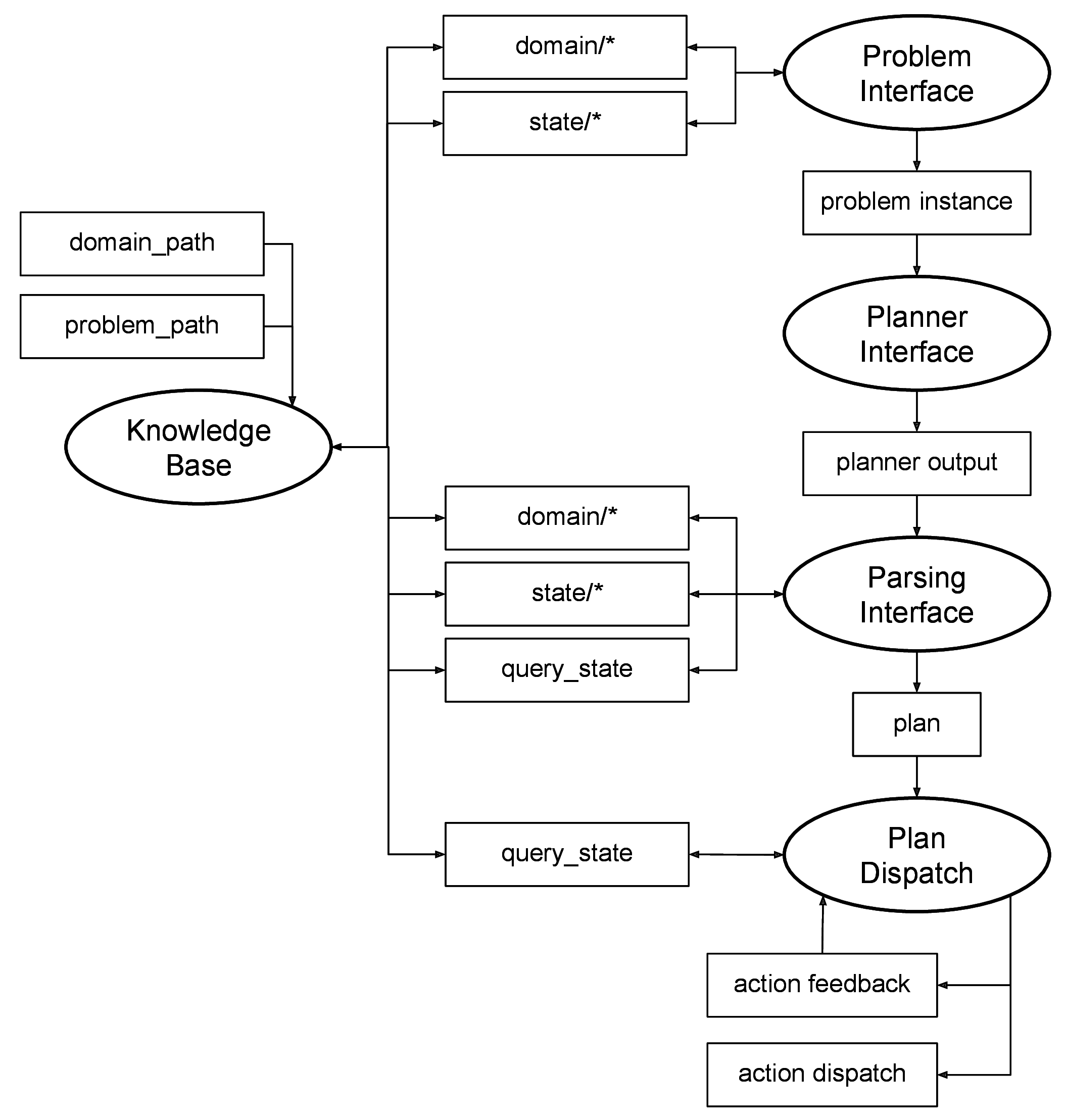
- The Knowledge Base is used to store a PDDL model.
- The Problem Interface is used to generate a PDDL problem, publish it on a topic, or write it to file.
- The Planner Interface is used to call a planner and publish the plan to a topic, or write it to file.
- The Parsing Interface is used to convert a PDDL plan into ROS messages, ready to be executed.
- The Plan Dispatch encapsulates plan execution.
Knowledge Base
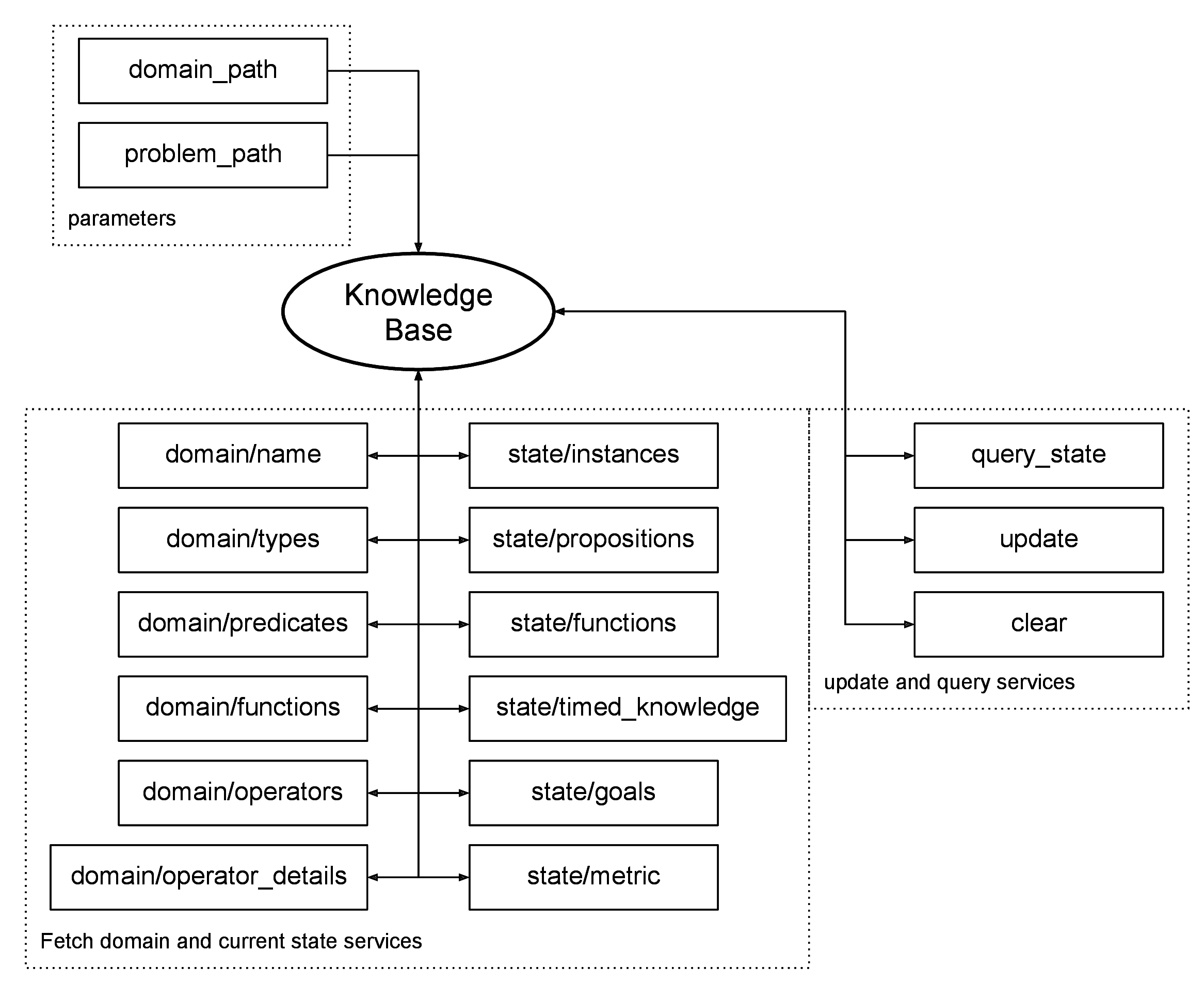
The Knowledge Base stores the PDDL model. It stores both a domain model and the current problem instance. The Knowledge Base:
- Loads a PDDL domain (and optionally problem) from file.
- Stores the state as a PDDL instance.
- Is updated by ROS messages.
- Can be queried.
Problem Interface
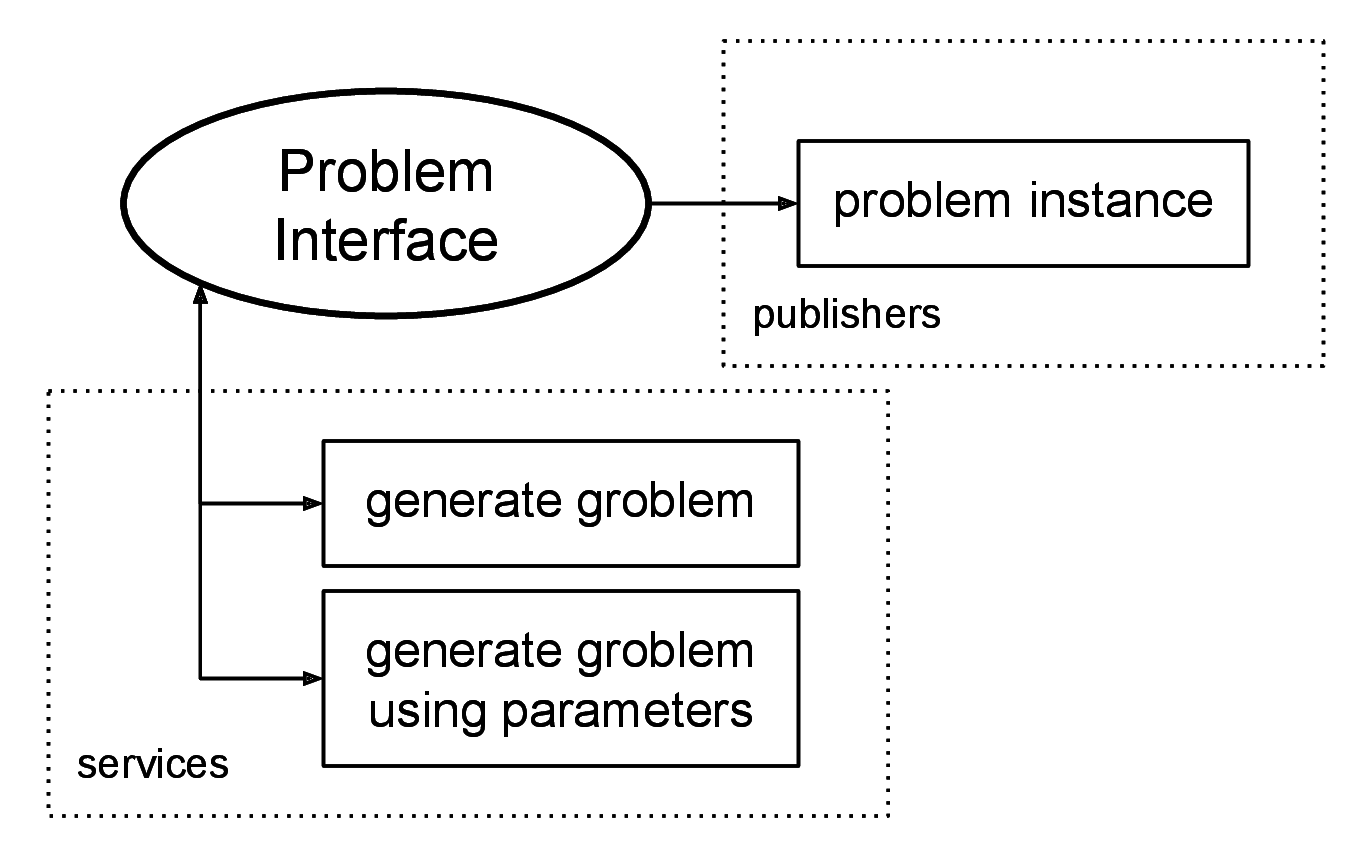
The Problem Interface node is used to generate a problem instance. It fetches the domain details and current state through service calls to a Knowledge Base node and publishes a PDDL problem instance as a string, or writes it to file.
Planner Interface
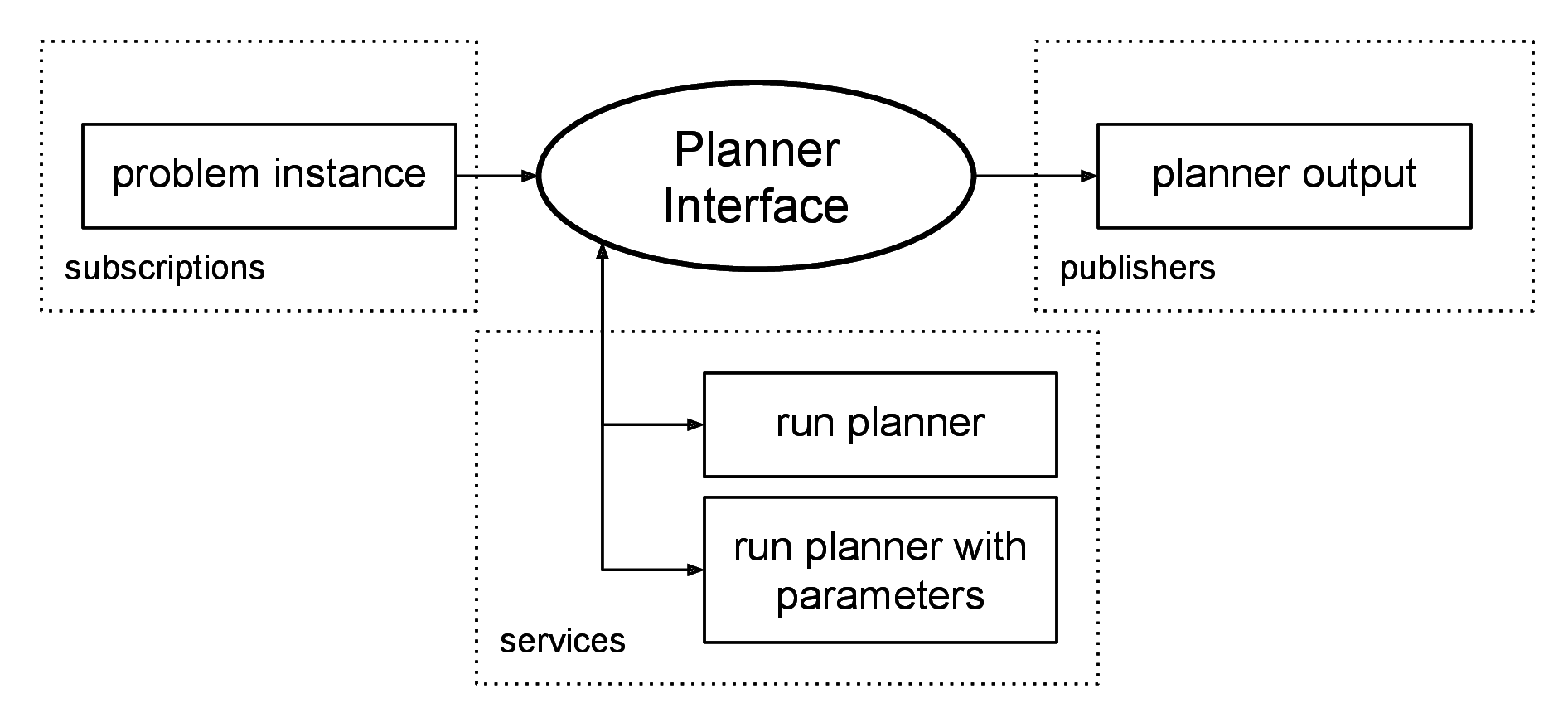
The Planner Interface node is a wrapper for the AI Planner. The planner is called through a service, which returns true if a solution was found. This interface feeds the planner with a domain file and problem instance, and calls the planner with a command line specified by parameter.
Parsing Interface
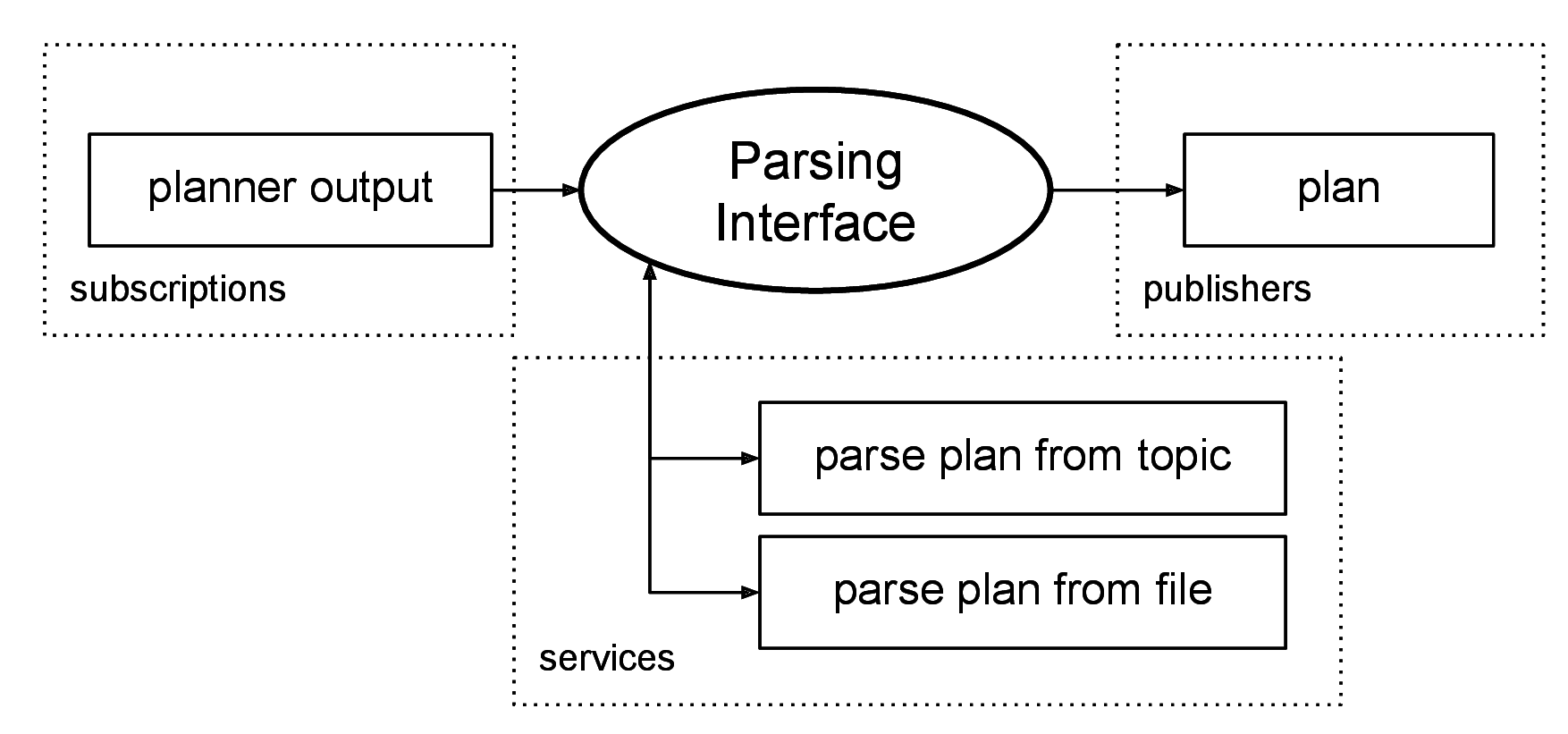
The Parsing Interface node is used to convert planner output into a plan representation that can be executed, and whose actions can be dispatched to other parts of the system.
Plan Dispatch
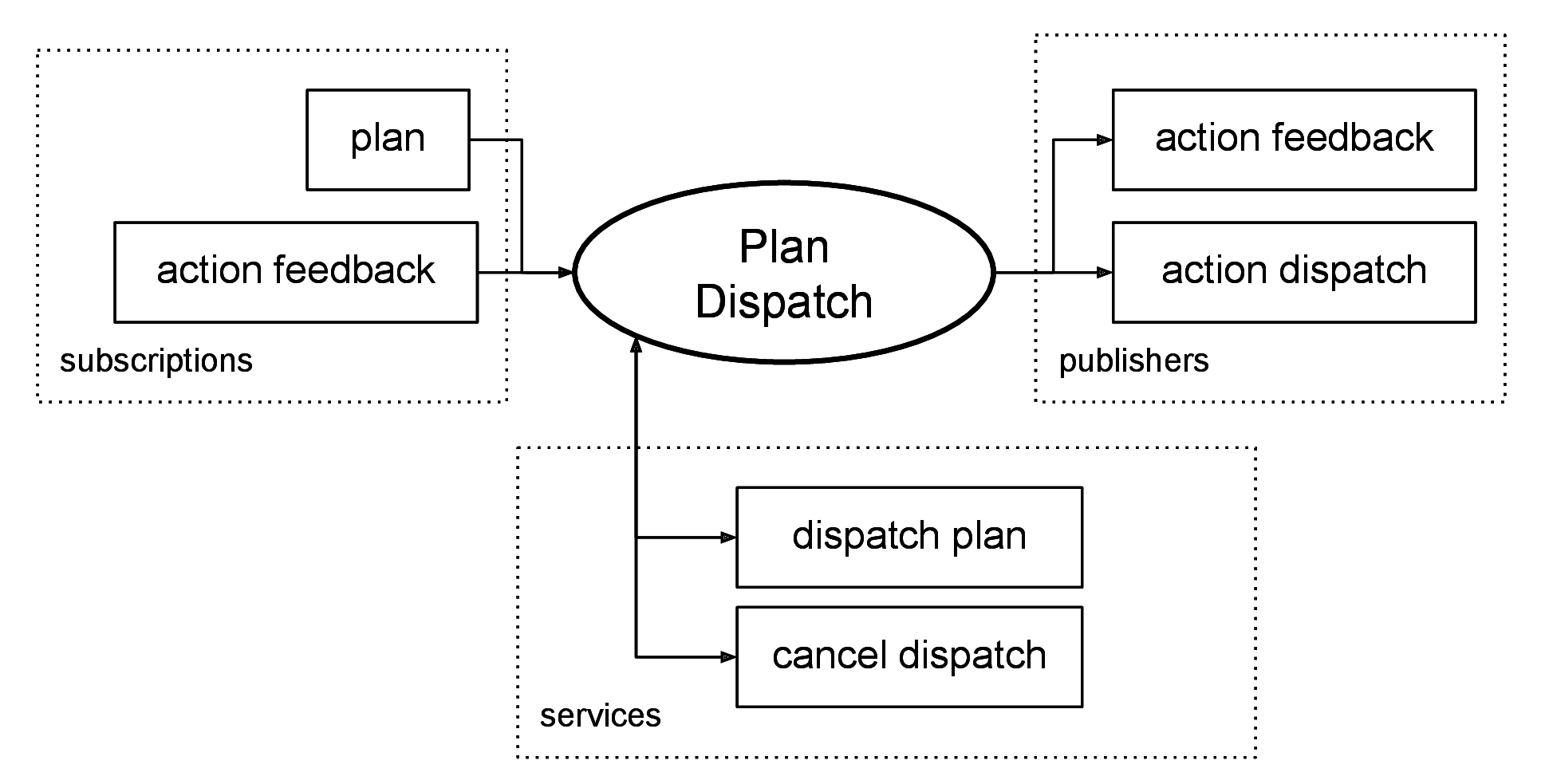
Plan Dispatch includes plan execution, and the process of connecting single actions to the processes which are responsible for their execution. An implementation of the Plan Dispatch node subscribes to a plan topic, and is closely tied to the plan representation of plans published on that topic.